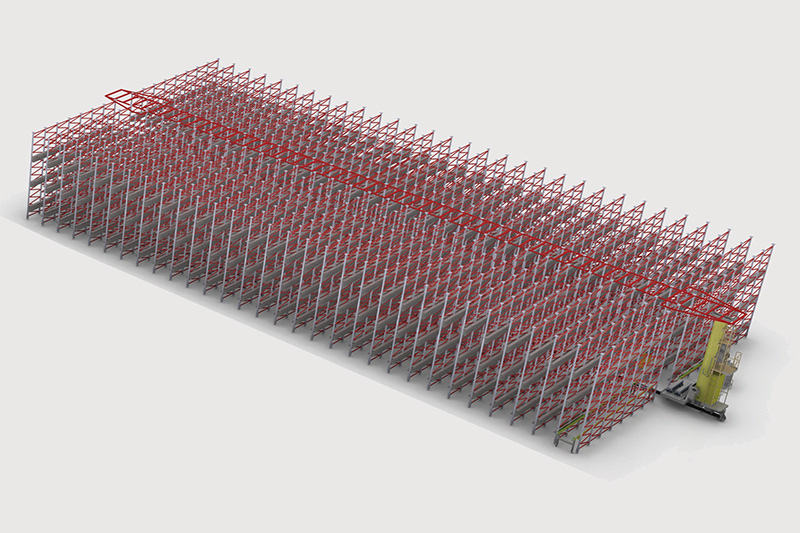
Awtomatiki sero koordinat palletizatory

Şanhaý LilanMüşderiniň aýratyn zerurlyklaryny kanagatlandyrmak üçin dürli giňişlik, paletdäki önüm arry we önümçilik tizliginiň talaplaryny kanagatlandyrmak üçin dürli görnüşli servo koordinat palletizatorlary dizaýn edilýär. Awtomatlaşdyryş ulgamy we maşyn dolandyryşy, baş gatlaklarynyň amallary bilen doly sinhronda ähli maşynyň işini dolandyrýar. Bu, merkezi sütündäki ýa-da hereketdäki dürli mehaniki gurnamalaryň dik we kesel hereketleriniň takyk traýektoriýalara we olaryň arasyndaky päsgelçilikden ýa-da baglanyşykdan gaça durýan koordinatlara eýermegini üpjün edýär.
Palletizasiýa çözgütlerimiz size üç sany esasy palletizasiýa meselesini birleşdirmäge mümkinçilik berýär - boş paletleri goýmak, gaplama gatlaklarynyň üstüni ýapmak we olaryň arasynda gatlak ýassygy goýmak we bu ugurda möhüm peýdalary hödürleýär.iş howpsuzlygy, amaly çeýeligi, wemaşynlara hyzmat etmek.
Şeýle hem, ýük göterýän we düşürilýän ýerleri dolandyrmagy gowulandyrýan forkliftleri, trans-paletleri we beýleki enjamlary ulanmak üçin gowy kesgitlenen ýere ünsi jemleýärler.
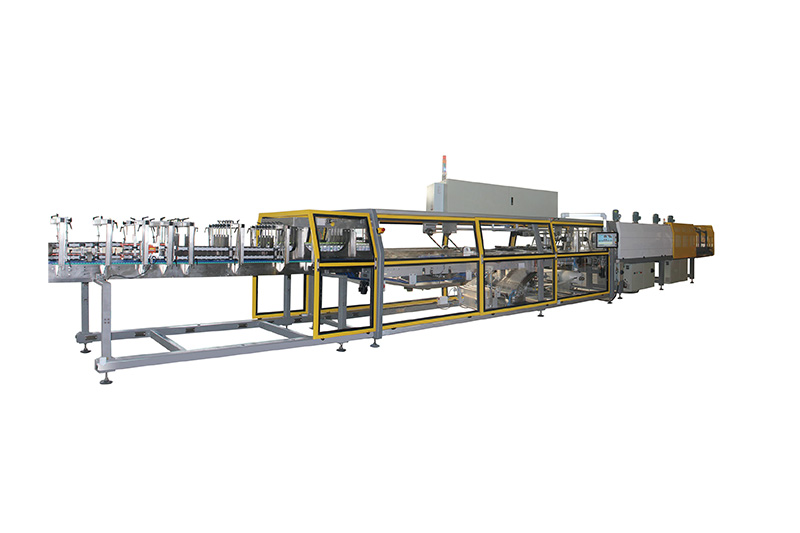
Önümiň görkezilmegi
- Univershliumumy, çeýe we göwrümli
- Ösen ergonomika we elýeterlilik bilen arassa dizaýn




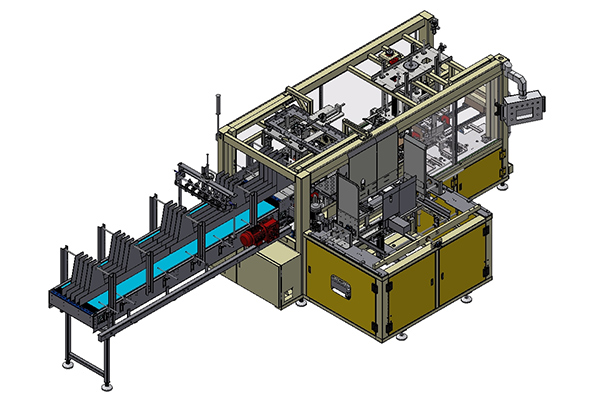
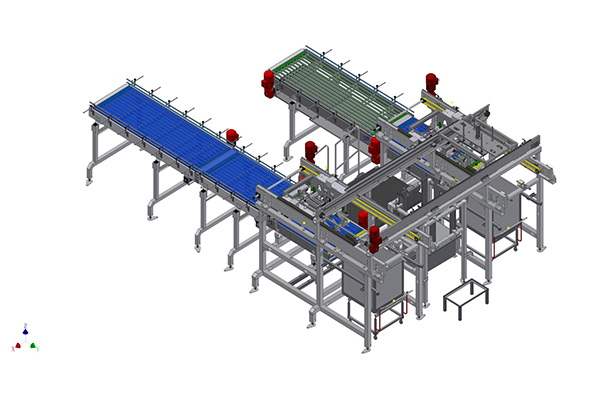
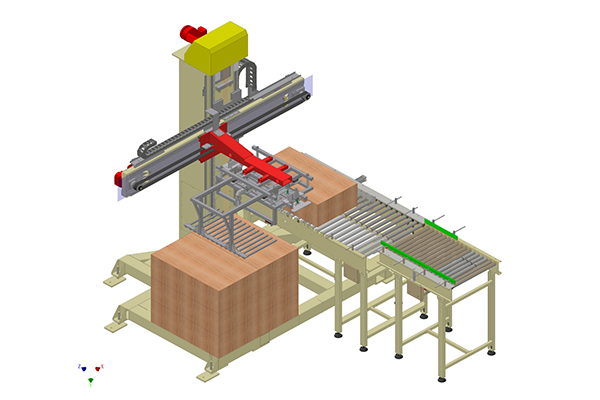
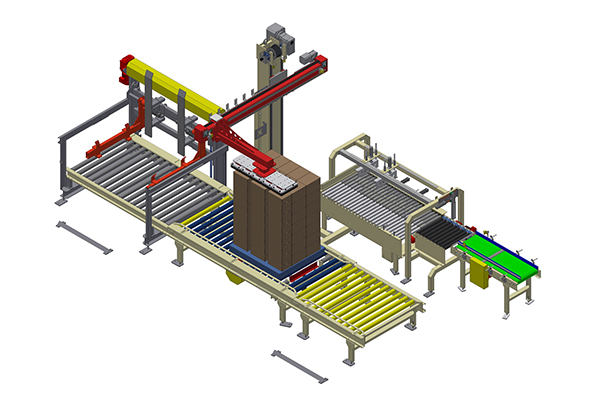
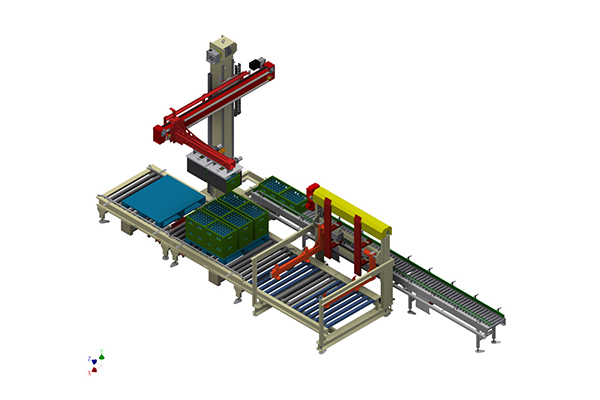
3D çyzgy




Elektrik konfigurasiýasy
| PLC | Siemens |
| Quygylyk öwrüji | Danfoss |
| Fotoelektrik induktory | Kesel |
| Sürüji motor | SEW / OMATE |
| Pnewmatiki komponentler | FESTO |
| Pes woltly enjam | Schneider |
| Ekrana degiň | Schneider |
| Servo | Panasonic |
Tehniki parametr
| Ackygyndy tizligi | Bir minutda 20/40/60/80/120 karton |
| Maks. göterijilik ukyby / gatlagy | 190Kg |
| Maks. göterijilik ukyby / palet | Maks 1800kG |
| Maks. stakanyň beýikligi | 2000mm (Custöriteleşdirilen) |
| Gurnama güýji | 17 KW |
| Howa basyşy | ≥0.6MPa |
| Kuwwat | 380V.50Hz, üç fazaly + ýer simleri |
| Howanyň sarp edilmegi | 800L / min |
| Paletiň ululygy | Müşderiniň islegine görä |
Has köp wideo görkezýär
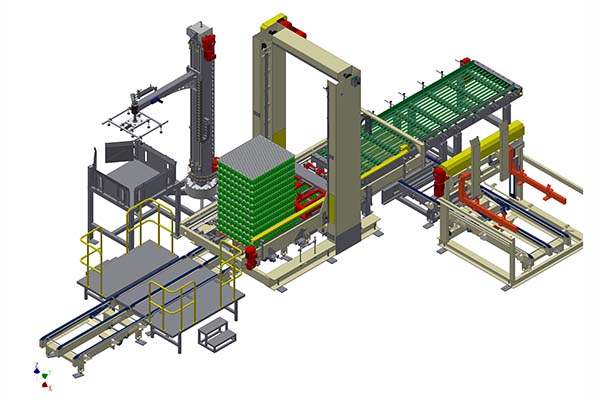
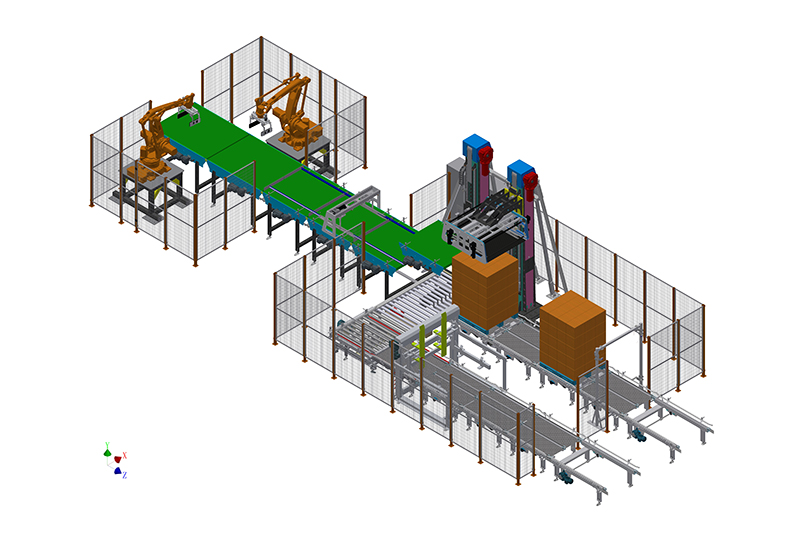
Iki sütün palletizator ulgamy (robot toparlamak mehanizmi bilen)
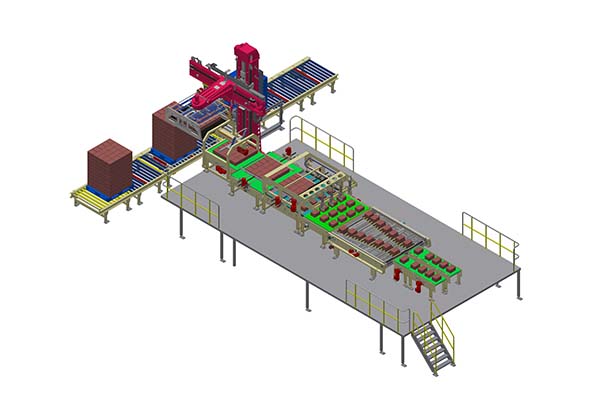
Sütün paletizator ulgamy (kartonlar üçin)
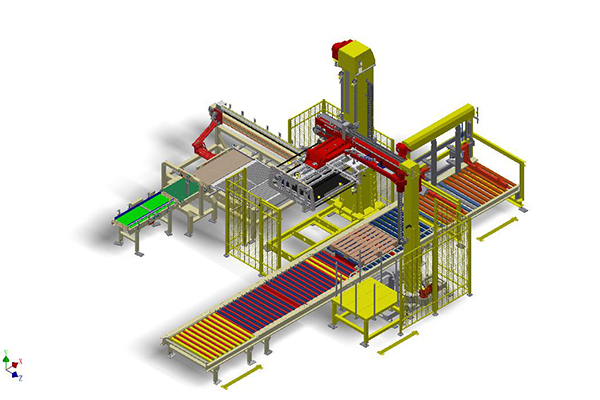
Sütün paletizator ulgamy (surata düşürilen çüýşeleri gysmak üçin)
Sütün palletizator ulgamy (5 gallon çüýşe üçin) has giňişleýin maglumat üçin
Satuwdan soň
- 1. Ajaýyp hilini üpjün etmek
- 2. 10 ýyldan gowrak iş tejribesi bolan hünärmen inersenerler, hemmesi taýyn
- 3. Sahypada gurnamak we düzetmek üçin elýeterli
- 4. Derrew we netijeli aragatnaşygy kepillendirmek üçin tejribeli daşary söwda işgärleri
- 5. Ömürboýy tehniki goldaw beriň
- 6. Zerur bolsa operasiýa okuwyny beriň
- 7. Çalt jogap bermek we wagtynda gurmak
- 8. Professional OEM we ODM hyzmatyny beriň