CE servo korpus gaplaýyş enjamy

Indi sarp edijimiz üçin ýokary hilli hyzmatlary hödürlemek üçin ökde, öndürijilik toparymyz bar. Biz köplenç müşderilere gönükdirilen, “CE servo” koordinat gaplaýyş maşynlary üçin jikme-jikliklere esaslanýan ýörelgelere eýerýäris, “kiçi telekeçilik ýazgylary, hyzmatdaşlaryň ynamy we özara peýdasy” düzgünlerimiz bilen, hemmäňizi hökman bilelikde işlemegiňizi, biri-biriňiz bilen giňelmegiňizi hoşal edýäris.
Indi sarp edijimiz üçin ýokary hilli hyzmatlary hödürlemek üçin ökde, öndürijilik toparymyz bar. Biz köplenç müşderilere gönükdirilen, jikme-jikliklere gönükdirilen ýörelgelere eýerýärisCase Packer, Biz diňe bir içerde we daşary ýurtly hünärmenleriň tehniki görkezmelerini yzygiderli hödürlemän, eýsem dünýädäki müşderilerimiziň isleglerini kanagatlandyrmak üçin yzygiderli täze we ösen zatlary ösdüreris.
Haryt maglumatlary
Bu enjam awtomatiki iýmitlendirmek, sortlamak, tutmak we gaplamak funksiýalaryna ýetip biler;
Önümçilik wagtynda önümler konweýer kemerleri bilen daşalýar we tertipleşdiriş talaplaryna laýyklykda awtomatiki tertipleşdirilýär. Önümleriň tertibi gutaransoň, önümleriň bir gatlagy gysgyç bilen gysylýar we gaplamak üçin gaplaýyş ýerine göterilýär. Bir gutyny doldurandan soň, önümçiligiň netijeliligini ýokarlandyrmak üçin gaýtadan ulanylýar;
Karton böleklerini önümleriň ortasyna ýerleşdirmek üçin SCAR robotlary enjamlaşdyrylyp bilner;
Arza
Bu enjam çüýşeler, çelekler, bankalar, gutular we gap-gaçlar ýaly önümleri kartonlara gaplamak üçin ulanylýar. Içgi, azyk, derman we gündelik himiýa pudaklarynda önümçilik liniýalaryna ulanylyp bilner.




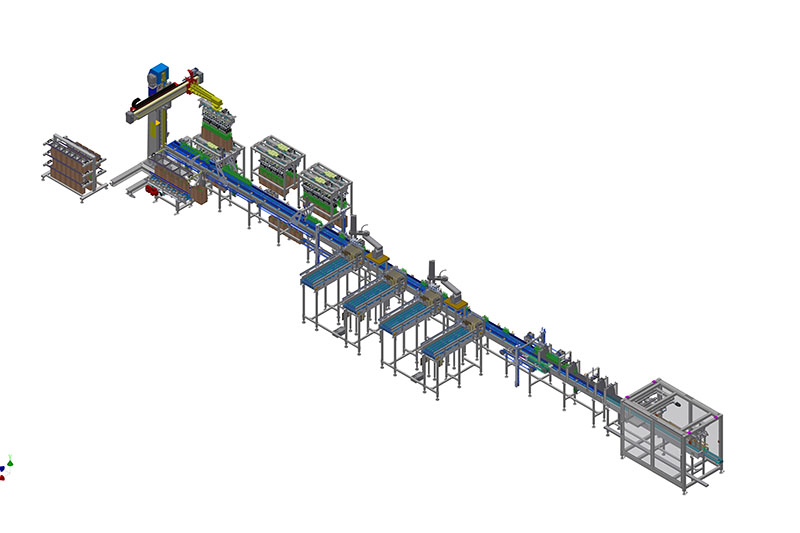
Önümiň görkezilmegi


3D çyzgy
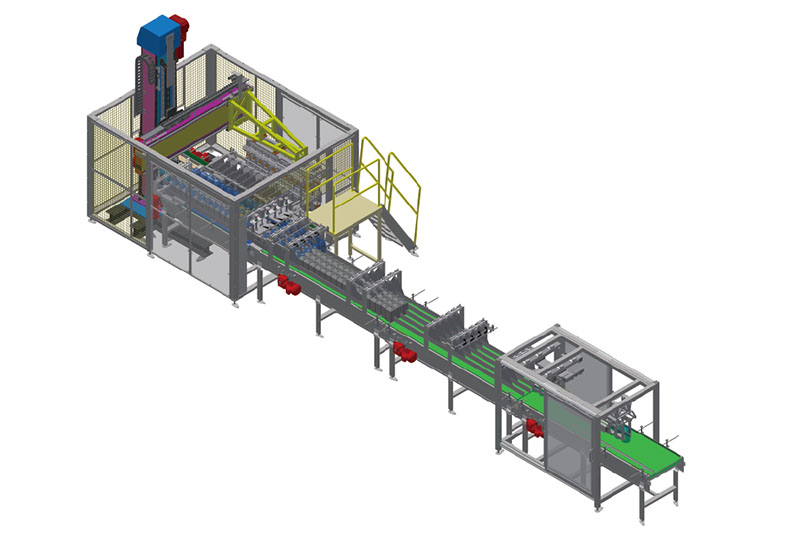
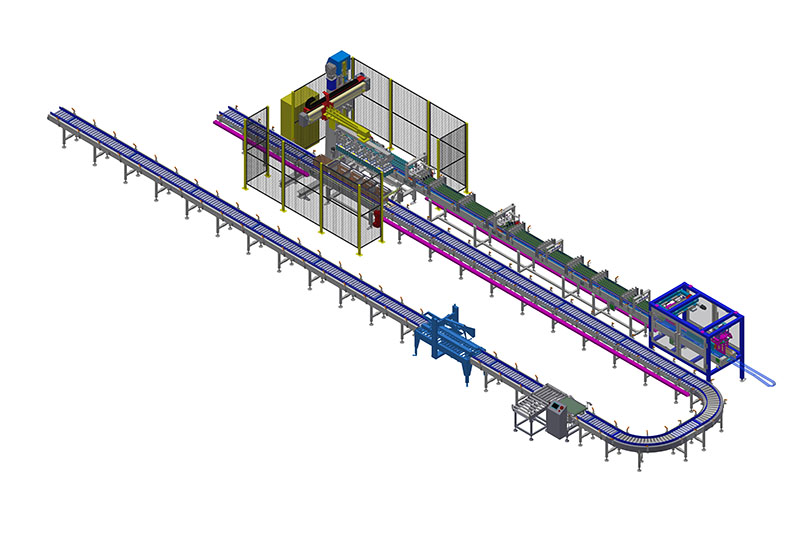
Servo karton gaplaýyş çyzygyny utgaşdyrýar (karton bölümi bilen)




Elektrik konfigurasiýasy
| PLC | Siemens |
| VFD | Danfoss |
| Servo motor | Elau-Siemens |
| Fotoelektrik datçigi | Kesel |
| Pnewmatiki komponentler | SMC |
| Ekrana degiň | Siemens |
| Pes woltly enjam | Schneider |
| Terminal | Feniks |
| Motor | TIK |
Tehniki parametr
| Model | LI-SCP20 / 40/60/80/120/160 |
| Tizlik | 20-160 karton / min |
| Elektrik üpjünçiligi | 3 x 380 AC ± 10% , 50HZ , 3PH + N + PE. |
Has köp wideo görkezýär
- Işe girizilende çakyr aýna çüýşesi üçin robot gaplaýyş enjamy
- Servo suw çelekleri üçin gaplaýjy gaplaýjy
Müşderilerimize ýokary hilli gaplama liniýasyny meýilleşdirmek we dizaýn hyzmatlary bilen üpjün etmek üçin indi ökde we ajaýyp öndürijilik toparymyz bar. Servo koordinat gaplaýyş enjamy haýal gaplamagyň netijeliligi we ýokary gaplama bahasy meselelerini netijeli çözüp biler we azyk, derman, içgi we nebithimiýa ýaly köp pudaklarda ulanylyp bilner. Gaplaýyş maşynlarynyň hilini üpjün etmek üçin CE şahadatnamasy we dolandyryş ulgamy şahadatnamasy bar. “Müşderi merkezi, jikme-jikliklere gönükdirilen” maksadyna eýerýäris, dünýäni maslahatlaşmaga gelýäris. Gaplaýyş enjamlarymyzy yzygiderli optimizirlemek we içerki we daşary ýurtly hünärmenleriň tehniki görkezmelerini hödürlemek üçin dürli pudaklardaky gözleg institutlary we uniwersitet edaralary bilen hyzmatdaşlyga ýetdik we dünýädäki müşderileriň isleglerini kanagatlandyrmak üçin täze ösen önümleri ösdürmegi dowam etdireris.








