Robot depalletizator
Haryt maglumatlary
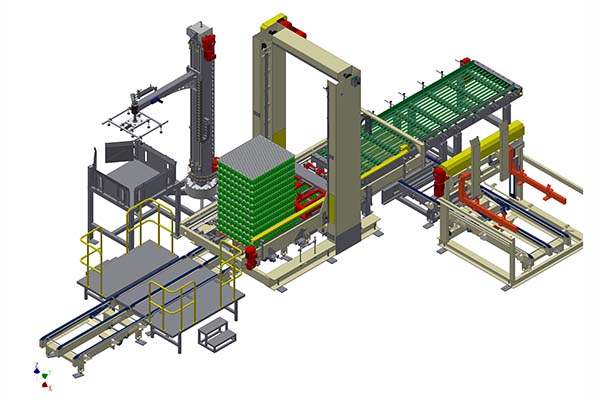
Önümçilik döwründe önümleriň ähli bölegi zynjyrly konweýer bilen depalizasiýa stansiýasyna daşalýar we göteriş mehanizmi tutuş paleti depalizasiýa beýikligine çykarar, şonda interfeýs listini sorujy enjam kagyzy saýlar we kagyz ammaryna ýerleşdirer, şondan soň geçiriji gysgyç önümleriň ähli gatlagyny konweýeriň içine geçirer we palet gutarýança ýokardaky hereketleri gaýtalaýar.
Arza
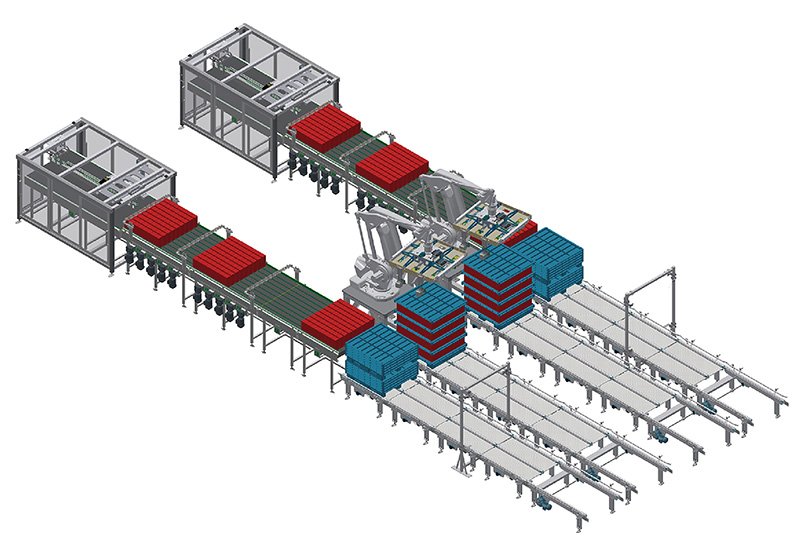
Gutulary, PET çüýşelerini, aýna çüýşeleri, bankalary, plastmassa çelekleri, demir çelekleri we ş.m. awtomatiki düşürmek üçin amatly.
Önümiň görkezilmegi


3D çyzgy

Elektrik konfigurasiýasy
| Robot goly | ABB / KUKA / FANUC |
| PLC | Siemens |
| VFD | Danfoss |
| Servo motor | Elau-Siemens |
| Fotoelektrik datçigi | Kesel |
| Pnewmatiki komponentler | SMC |
| Ekrana degiň | Siemens |
| Pes woltly enjam | Schneider |
| Terminal | Feniks |
| Motor | TIK |
Tehniki parametr
| Model | LI-RBD400 |
| Önümçilik tizligi | 24000 çüýşe / sagat 48000 gapak / sagat 24000 çüýşe / sagat |
| Elektrik üpjünçiligi | 3 x 380 AC ± 10% , 50HZ , 3PH + N + PE. |
Has köp wideo görkezýär
- Bölünýän we birleşdirýän çyzykly çüýşeler üçin robot depalletizator
- Bölünýän we birleşdirýän çyzykly gutular üçin robot depalletizatory